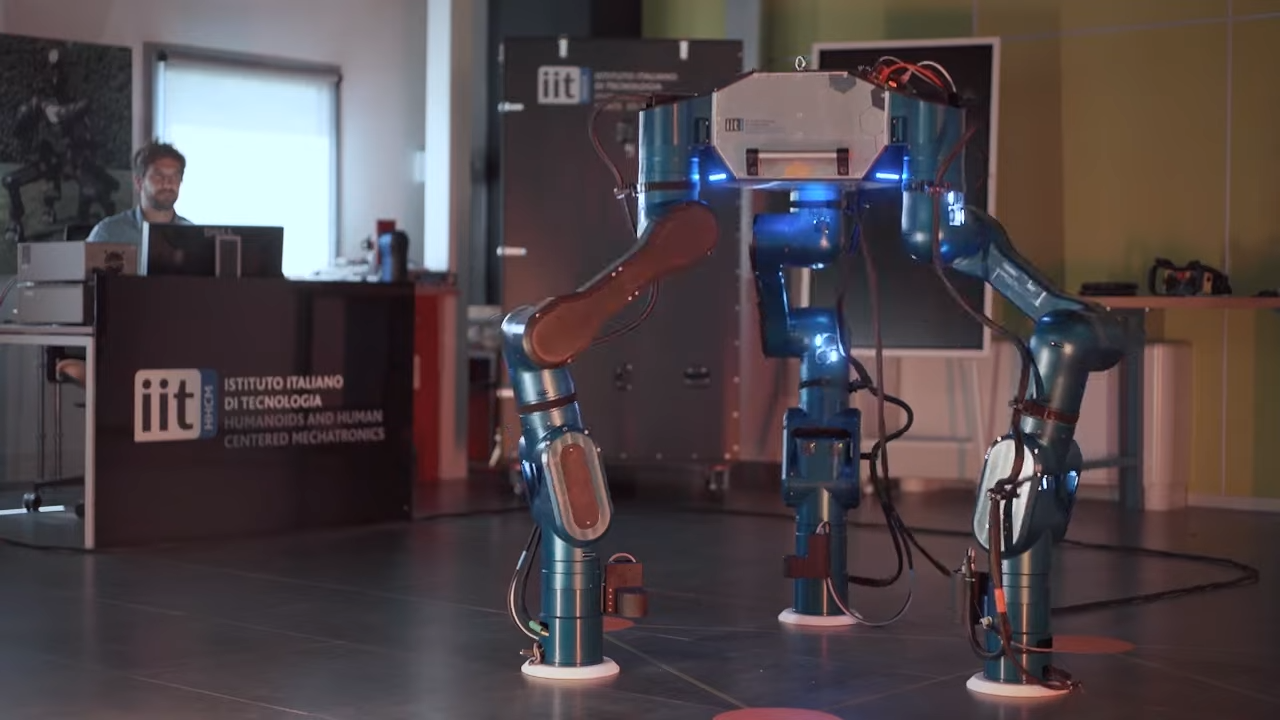
MARM, talijanski tronožni robot razvijen za primjenu u svemiru
Talijanski su istraživači prikazali prototip robota kakav bi jednog dana mogao biti pomoćnik astronautima pri održavanju infrastrukture u svemirskim postajama, bazama, pa čak i na drugim planetima

Istraživači s talijanskog instituta IIT (Istituto Italiano di Tecnologia) predstavili su revolucionarnu robotsku platformu za primjenu u svemiru. Nazvali su je MARM (Multi-Arm Relocatable Manipulator), djelomično ju je financirala i Europska svemirska agencija, a u obliku prototipa prikazana je javnosti ovih dana.
Svemirski tronožac
Kao što vidimo, riječ je o pokretnom i svestranom robotu s tri noge, koji može manipulirati ovećim objektima. Za primjer, može slagati šesterokutne podne ploče široke 1,2 i debele 0,2 metra, mase do 12 kilograma, a može preslagivati i razne module kakvi se često nalaze na svemirskim postajama i velikim orbitalnim letjelicama.
Zahvaljujući tronožnom dizajnu MARM je stabilniji, fleksibilniji i mobilniji od četveronožnih robota, ima veću pokretljivost i širi raspon kretanja. Pomoću tri noge u stanju je kretati se, "ukopati" se na mjestu, a središnjim dijelom može hvatati predmete i potom ih transportirati prema potrebi. Osnovni mu je cilj jednom u budućnosti biti na pomoći astronautima prilikom održavanja infrastrukture – bilo u orbiti, na svemirskim postajama ili drugim planetima. Iz tog će razloga biti testiran u simulatorima mikrogravitacije i bestežinskom stanju.
Imat će i funkciju "percepcije" okoline, pa će moći zadatke izvršavati i bez izravnog nadzora ljudi. Hvatanje, premještanje tereta i njegovo konačno postavljanje na željenu lokaciju bit će primarni poslovi za koje će MARM biti specijaliziran, bez obzira o gravitacijskim uvjetima. Pokaže li se robot u narednim ispitivanjima korisnim i sposobnim izvršavati dodijeljene mu zadaće, istraživači IIT-a kažu kako će nastaviti s razvojem finalne verzije, potpuno spremne za upotrebu u svemiru.



























